
先前的作品页介绍了思腾手术机器人系统的设计细节,在这篇文章中我们将介绍部分设计背后的过程和思路。
这个项目有两个主要难点:
产品功能、场景和工作流的极度专业性和复杂性;
机械结构复杂,造型工作量大,难度高。

在历经数周针对这类产品的调研与学习后,我们选择从最具挑战性的任务 —— 医生控制台的设计入手。
医生控制台
医生控制台是主刀医生用来操控机械臂进行手术的控制平台。控制台通过 3D显示器实时显示病人体内的立体影像,通过左右两支主手操作臂用来精准捕捉主刀医师双手的复杂手术动作,并映射到患者手术平台的手术器械上。医生脚下还有一套脚踏用来切换模式,更换工具,调整内窥镜功能,触发手术器械的电凝电切等功能。

手术医生需要长时间、高强度地通过控制台来控制操作机器人进行手术。其中有大量复杂的人机交互,不仅会直接影响手术质量,也关系到手术师的长期职业健康,因此优良的人体工学和交互设计非常重要。
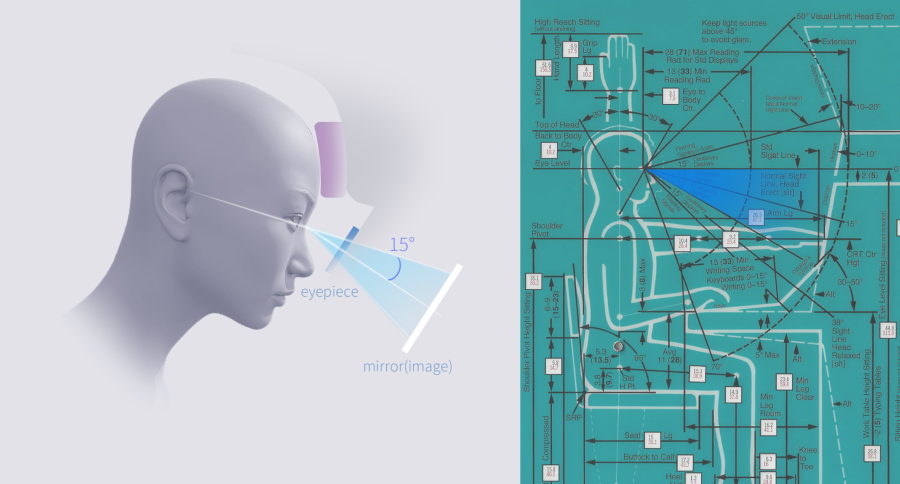
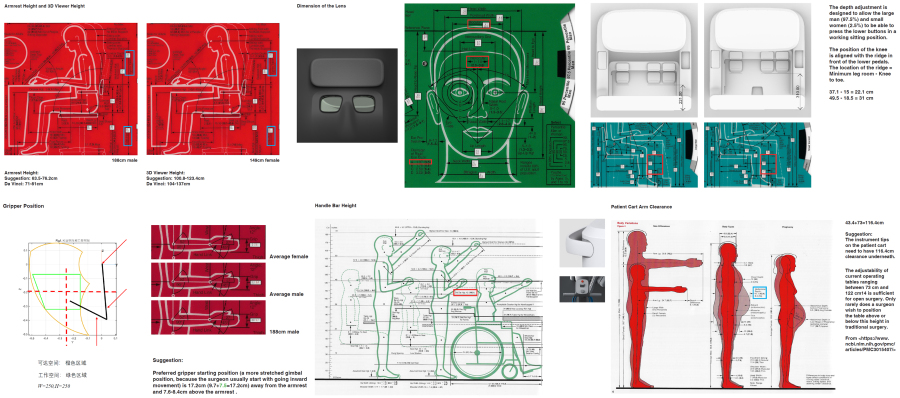
和消费级头显不同,医生控制台内置了两台接近电脑显示屏尺寸的屏幕,成像不需要经过透镜放大,可以给手术医师提供真实无畸变的图像,更清晰的双目 3D 画面,以及更舒适更远的对焦距离。

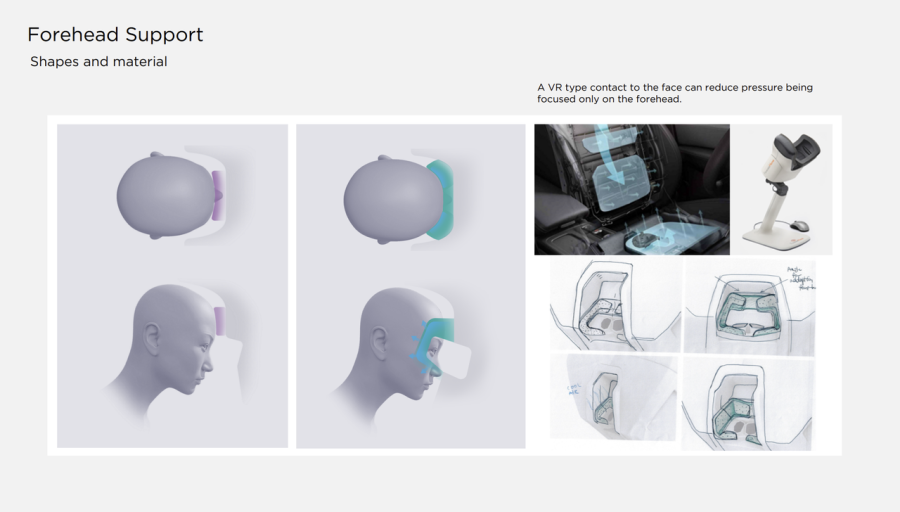
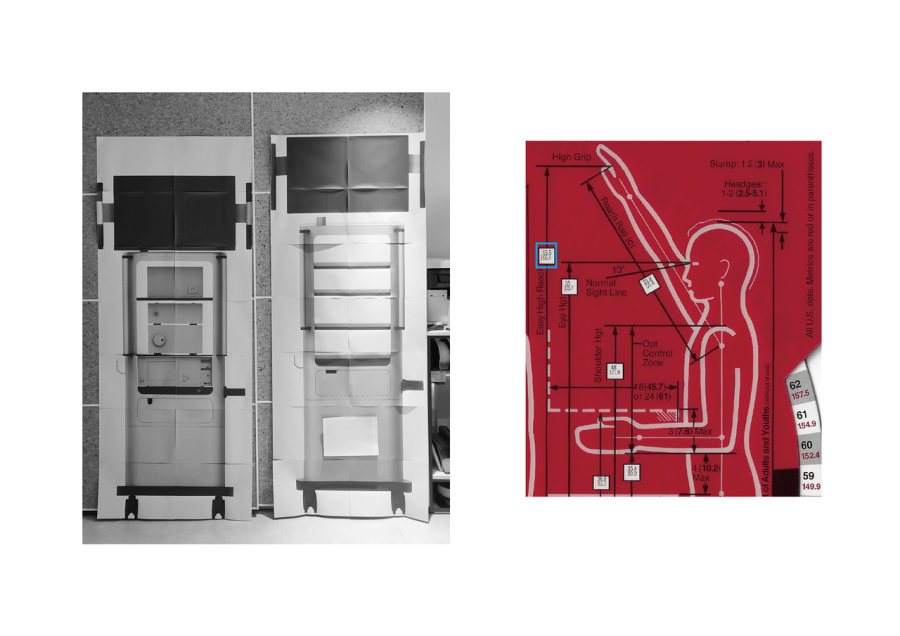
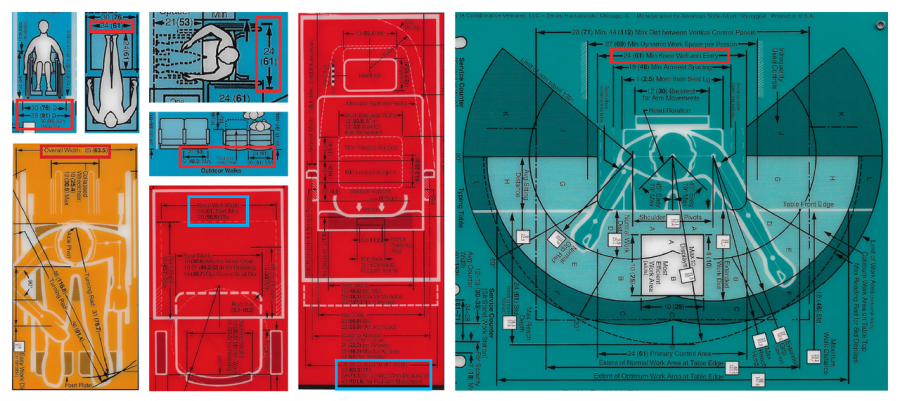
根据人体工学数据,人正常的视线范围处于眼睛水平线下 0 - 30° 的区域。我们根据这个数据调整了目镜与头托,将图像中心置于眼睛水平线下方 15 度的位置,让手术医师能够获得舒适的支撑与视角。
手术医生可根据自身的身高和坐姿习惯来调节观察器的位置和角度。以往的观察器在调节角度时,容易出现景进深和高度的偏移,导致医生需要再次调整才能找到舒适的姿势。为解决这一问题,我们设计了一套四连杆机构,使观察器在角度调整时能够与人上身前倾的运动轨迹相吻合,简化了调整步骤,让医生能够更便捷地切换坐姿,减少疲劳感。

通过查阅数据,我们发现亚洲人的头部轮廓更为宽阔。基于此,在设计头托时,我们将软垫设计为可拆卸的配件,并提供多种尺寸供选择,以便不同头型的手术医师都能找到适合自己的支撑垫,同时也更方便清洁和消毒。
增加坐姿舒适性
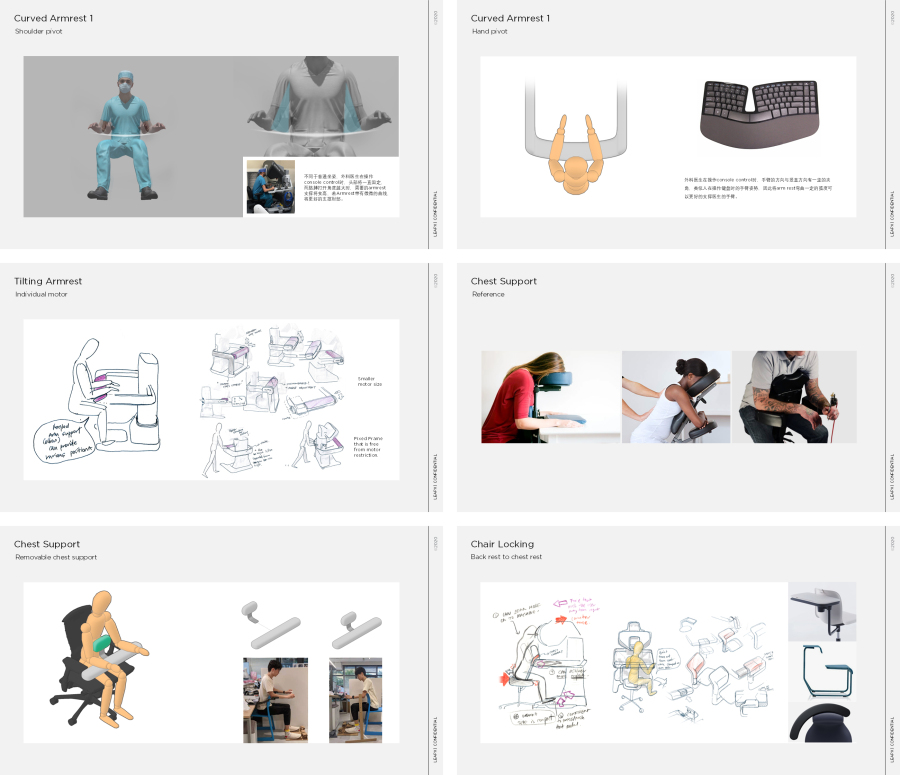

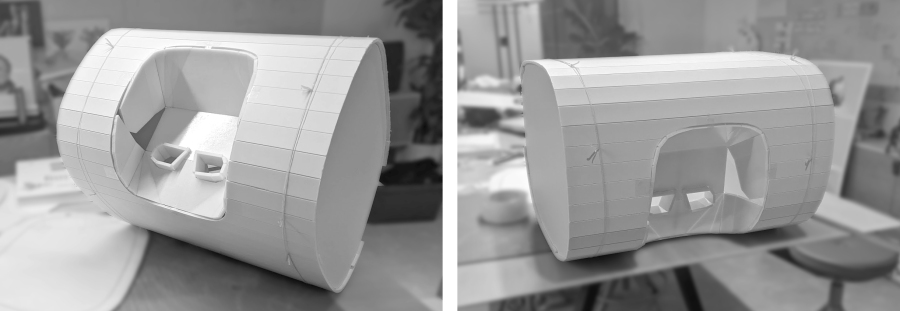
为了让手术医生在控制台前长时间操作手术更加舒适和健康,我们对不同坐姿进行了大量的研究。我们参考了不同专业的座椅和坐姿,并制作实物模型进行前期测试。

我们还将设计导入到VR环境中,通过VR头显设备,让团队在虚拟环境中查看和体验医生控制台的操作。

设计师体验成像效果

验证人机工学
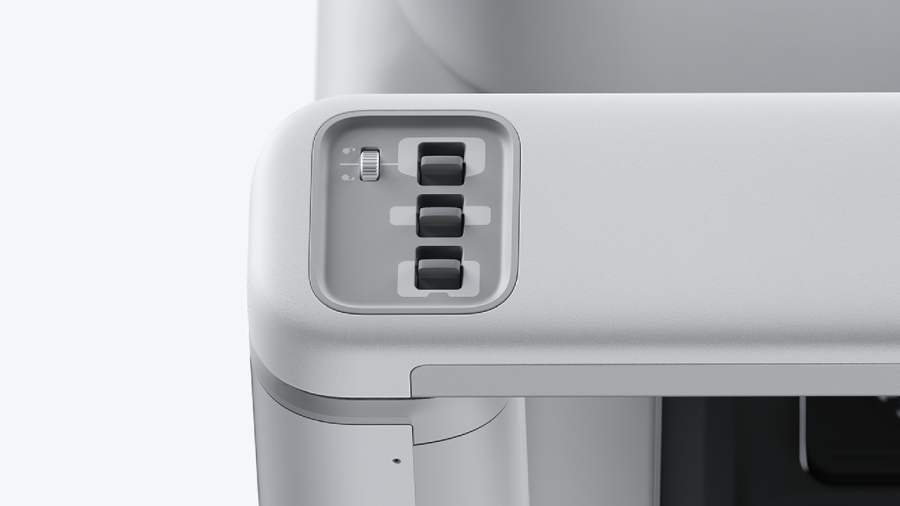
控制台各模块位置都可供调节,以便适应不同体型的手术医生。我们从汽车座椅的调整按钮获取灵感,设计了形象直观的调节面板,让医生一眼就能轻松的理解和调节这些模块。

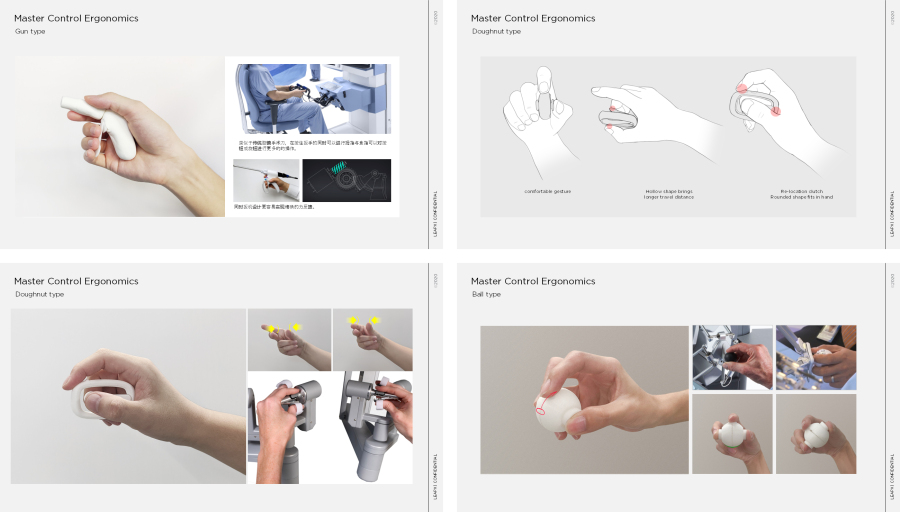
鸟形夹持器
传统的夹持器依靠拇指和中指控制移动,施力面积相对较小,对夹持器的移动控制较为费力。我们设想,如果夹持器具备握把结构,就能让移动控制更加方便,又能使夹持控制由食指和拇指独立完成,减少移动对夹持动作的干扰。对此我们参考了各类其他行业的手持控制器,并制作了大量不同原型进行测试和验证。




更多握持姿态探索
夹持器的施压处需要具备良好的摩擦力和接触面积,为此我们针对施压处的形状和纹理进行了试验。
降低离合操作难度
医生的操控器柄上设有一个离合器滑钮,用于与工具解耦,方便医生调整手臂姿势。我们尝试了多种离合按钮形式,以寻求最省力且最安全的解决方案。
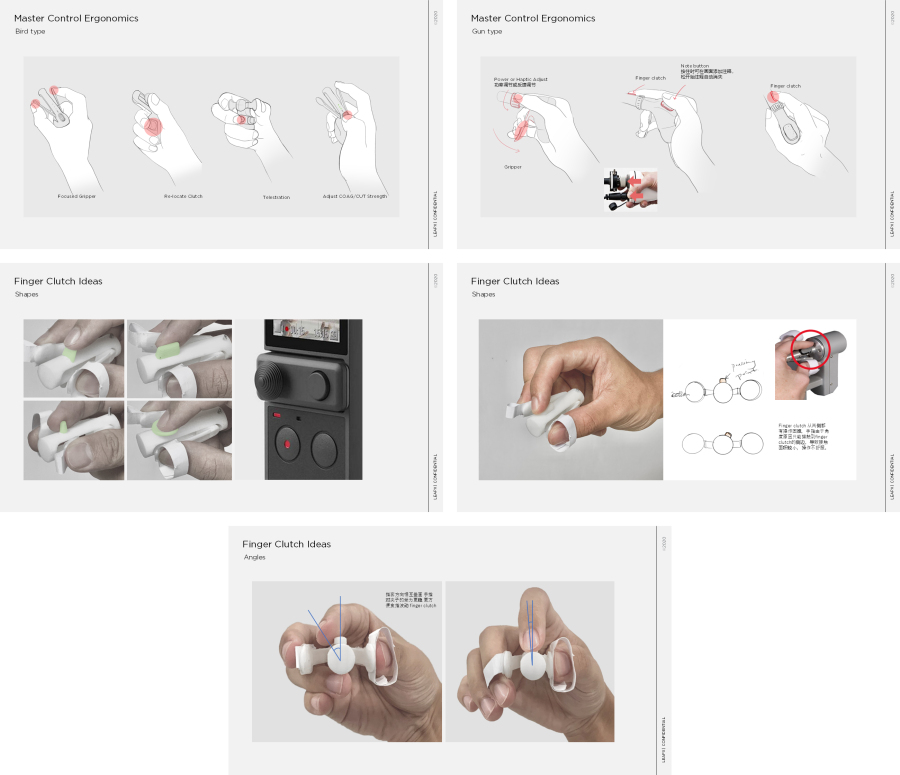
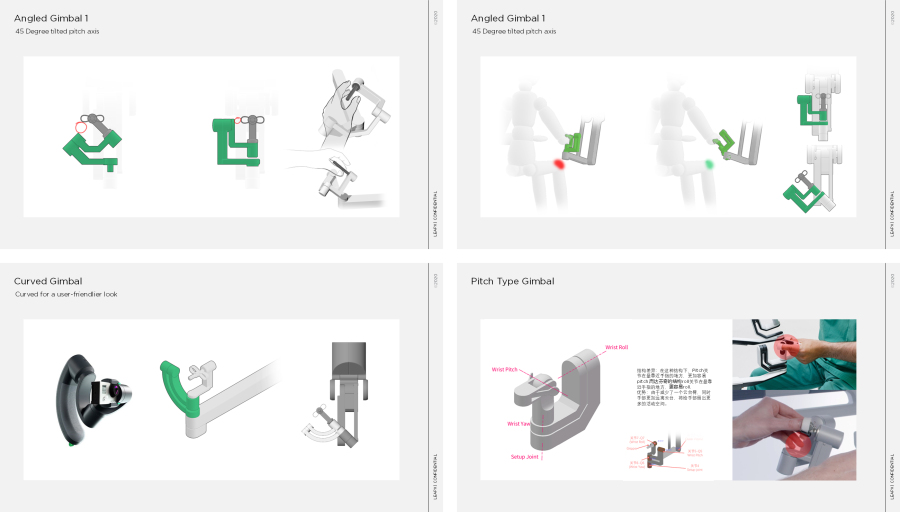
创造更多的操作空间
云台的形态会影响医生手部操作空间,为此,我们对云台的各种形式进行了尝试(比如圆弧形结构),力求最大程度减小云台对手术医师操作的干扰。
脚部踏板设计
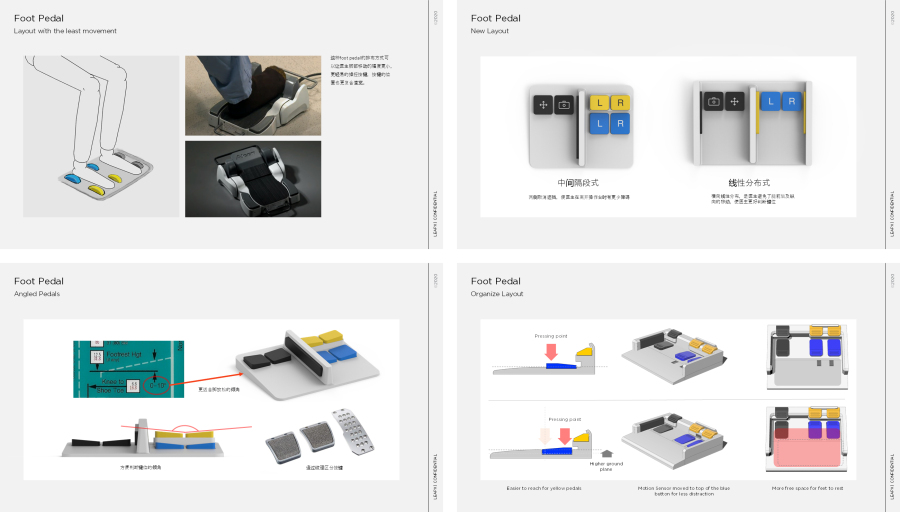
手术机器人的操控十分复杂,手术医生除了双手外,也需要通过双脚操控踏板去控制辅助功能。但由于手术医生的双眼需要保持在目镜前观测手术情况,使用踏板往往需要盲操。
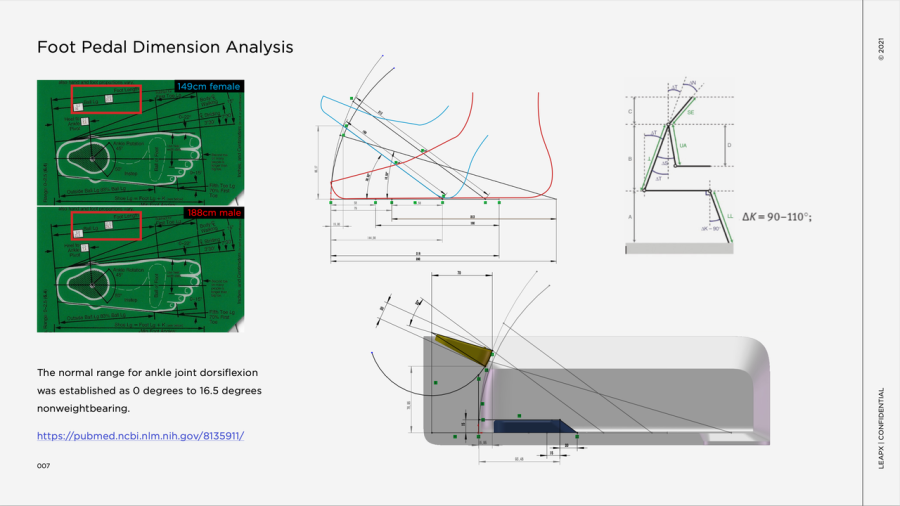
我们需要合理设计踏板的布局,降低医生的盲操难度,减少误触和误操作的几率。为此我们也仔细研究了人体脚部的尺寸和合适的活动范围。

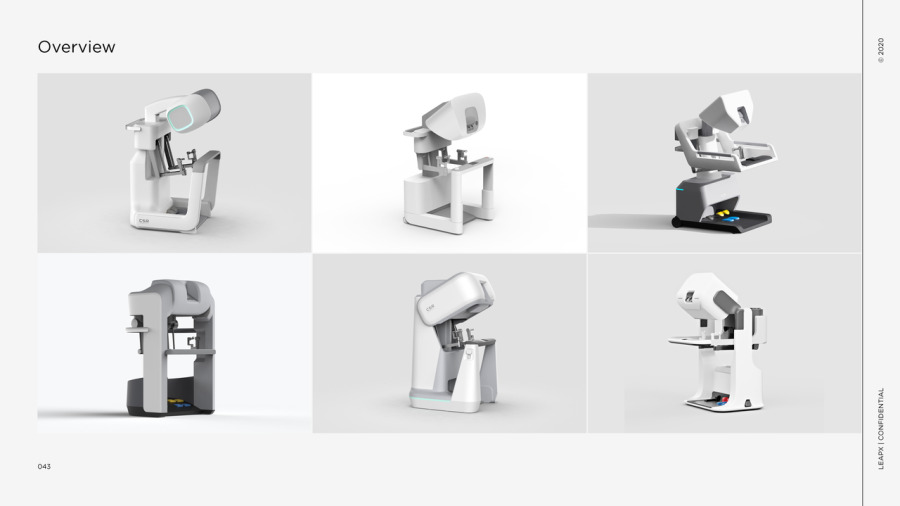
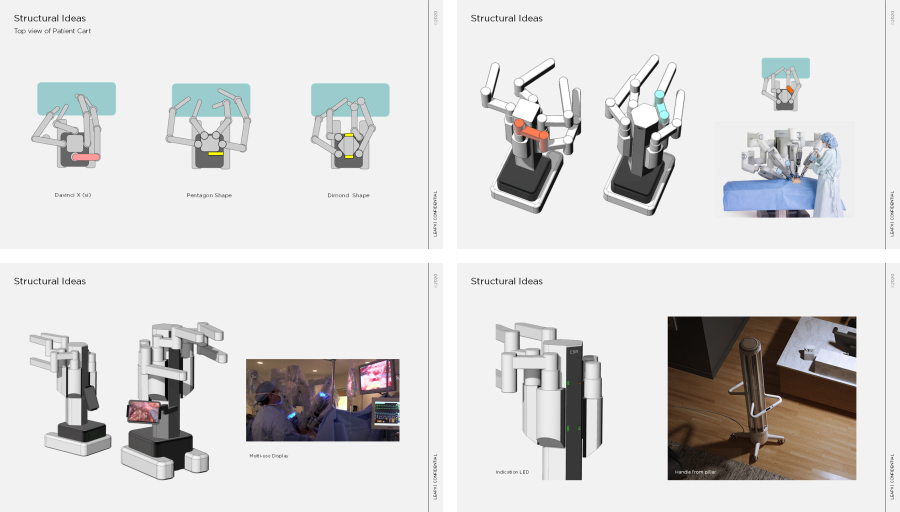
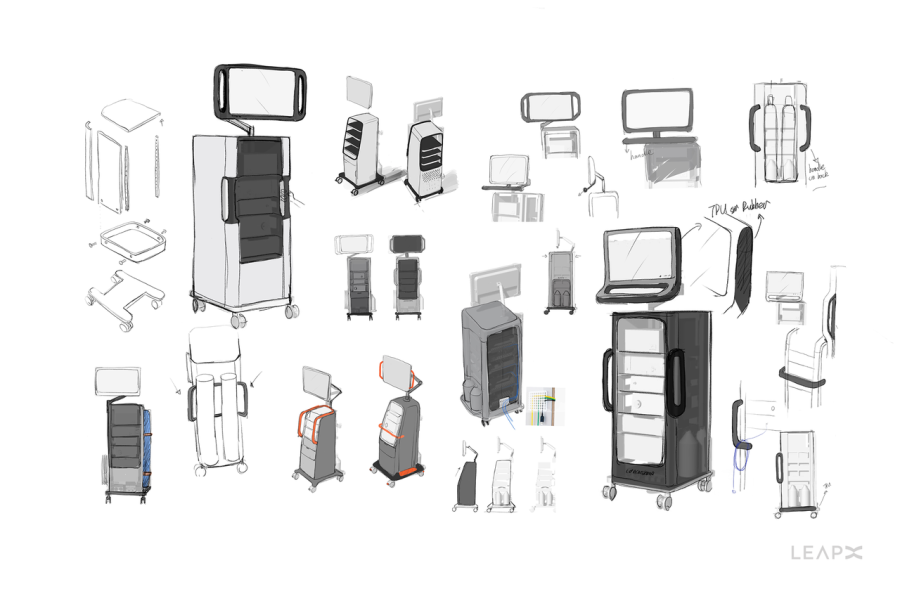
造型设计推敲
操作台的整体构型设计,要在满足各种调节要求的基础上,实现结构的高效性以及视觉上合适的大型比例和独特辨识度。
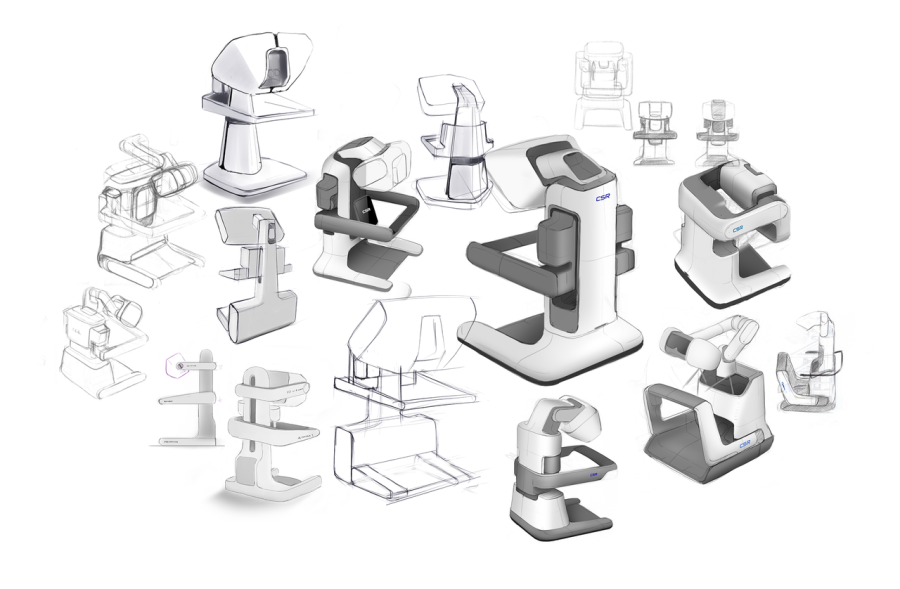
早在2021年,我们便尝试使用AI去混合生成大量不同的架构作为前期参考:
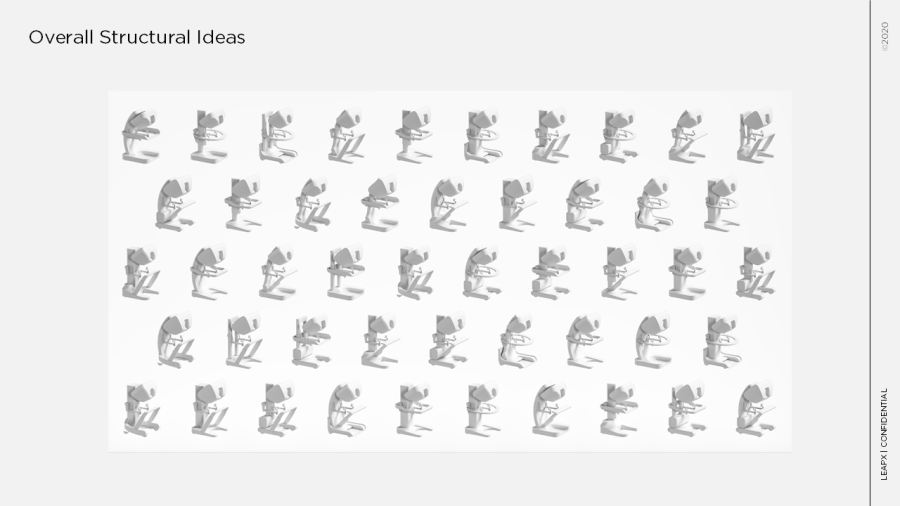
初步架构方案探索:

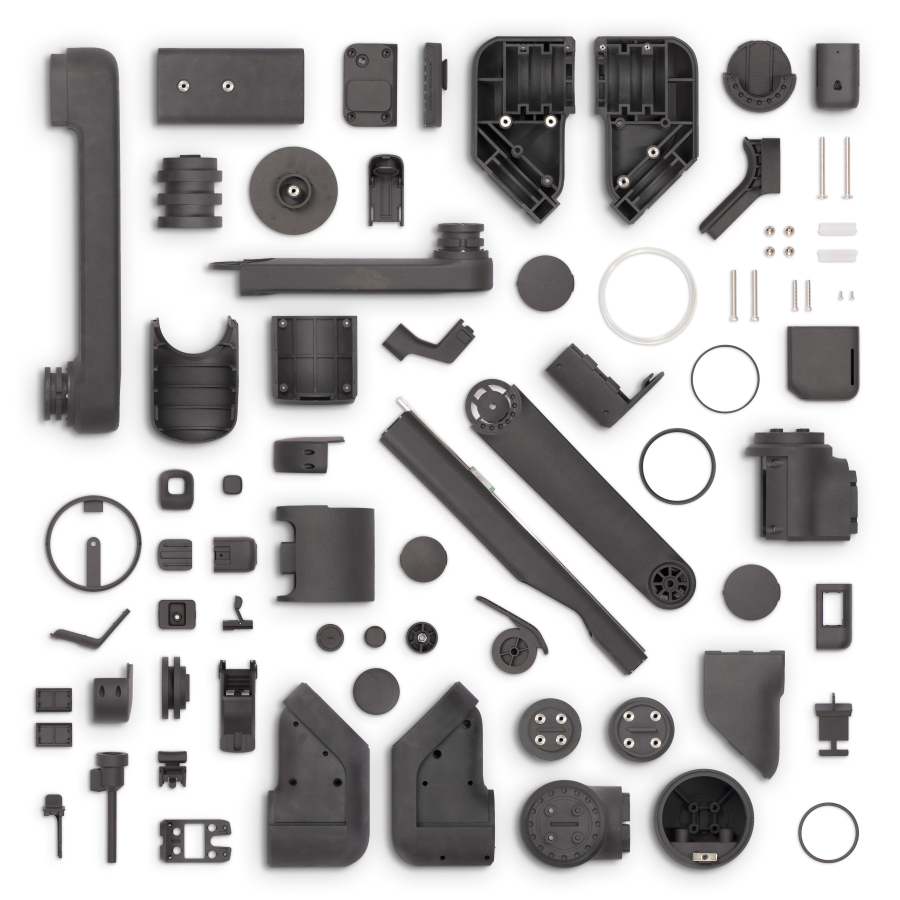
功能样机

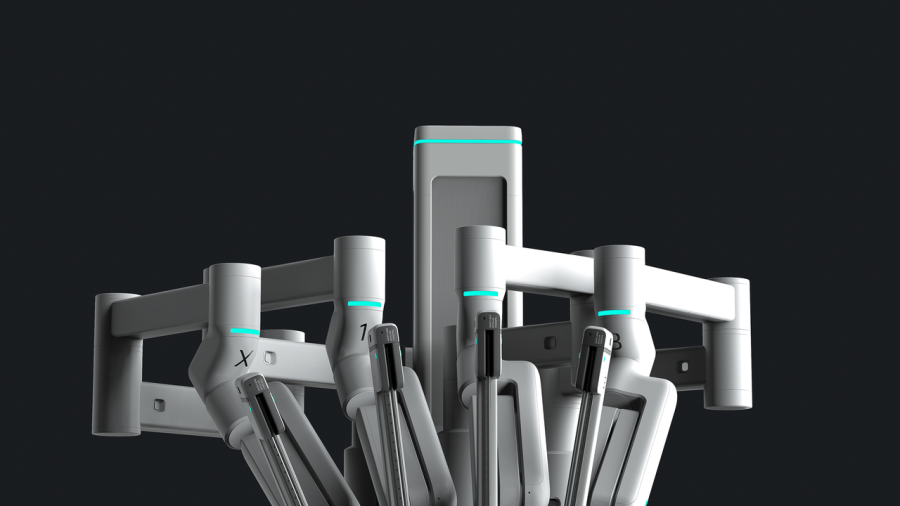
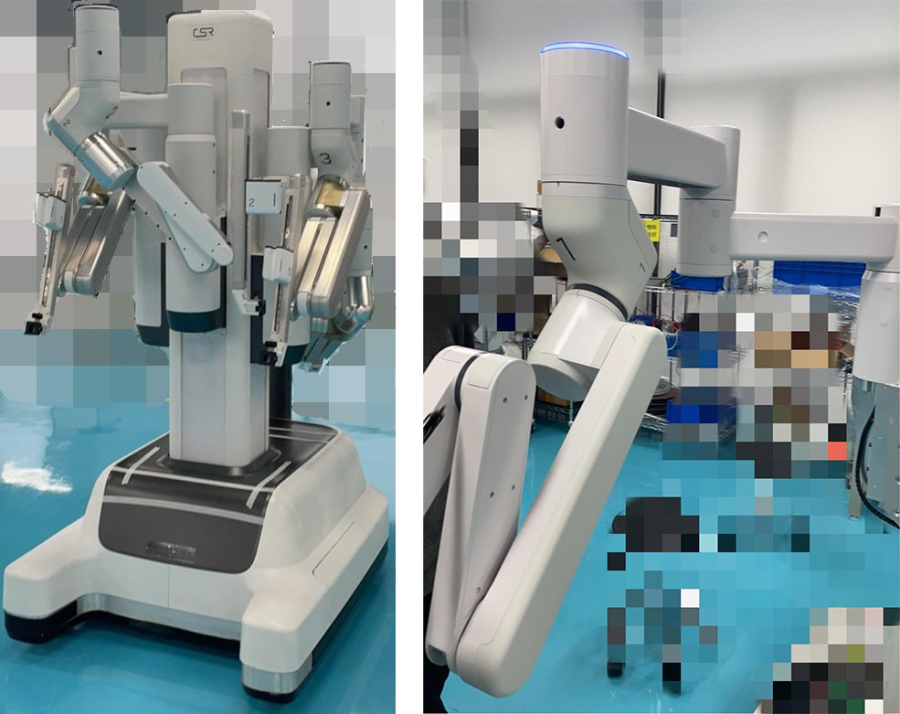
患者手术平台

患者手术平台配备了四支机械臂,末端装配各种手术器械,相当于手术医生双手的延伸,是手术系统中直接接触和进入病人体内的部分。因此设计考量中有两点非常重要:增加操作安全性与减少对病人的心理压力和恐惧感。

在现有的结构中,4 号臂需要绕过整个主干到达前方,导致 4 号臂比其他三只臂多一节。在早期的设计探索中,我们尝试了不同的主干形状和臂长组合,力求使机械臂结构更为简洁合理,同时避免相互干涉。
大型机器人的移动
手术前医护人员会推动患者手术平台至手术需要的合理位置。

由于四只机械臂位于驾驶握把的前方,可能会对驾驶的医护人员造成视觉遮挡,因此现场往往需要两个人配合操作移动。为此,我们曾设想增加一块监视屏和一套摄像头,将前方图像传输至屏幕,如同停车辅助系统一般,辅助医护人员一个人就能完成患者手术平台的定位操作。
后期还是决定删繁就简,我们设计了简洁易用的移动把手,护士只需要往目标方向轻推操作杆,患者手术平台便会自动往相应方向移动,从而实现精准入位手术台。

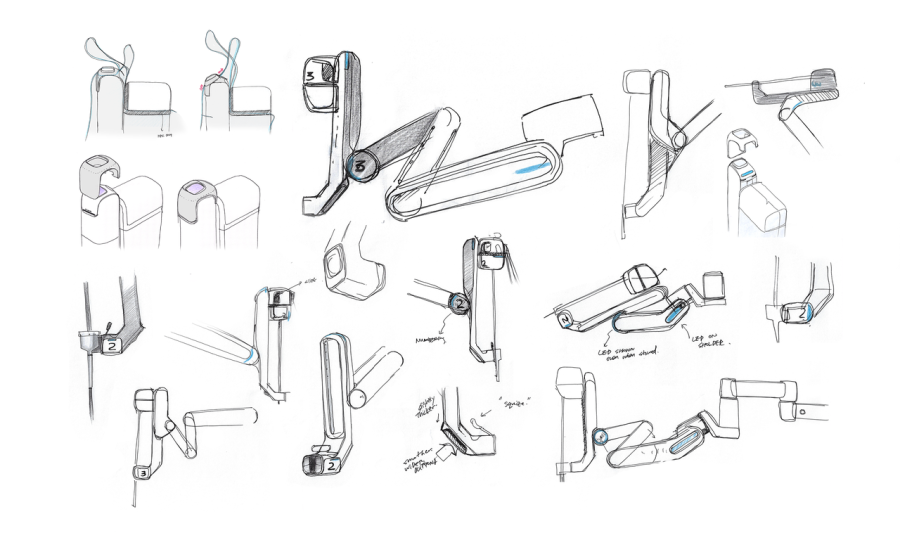
LED 提示灯
在前期的调研中我们发现,LED显示机器运行状态,至关重要;当医生助手操作某个部件时,会重点关注该部位周围的LED。
因此我们划分了LED的显示层级,在每个调节位的相应位置增设了指示灯,尽可能扩大 LED 灯的可视角度。
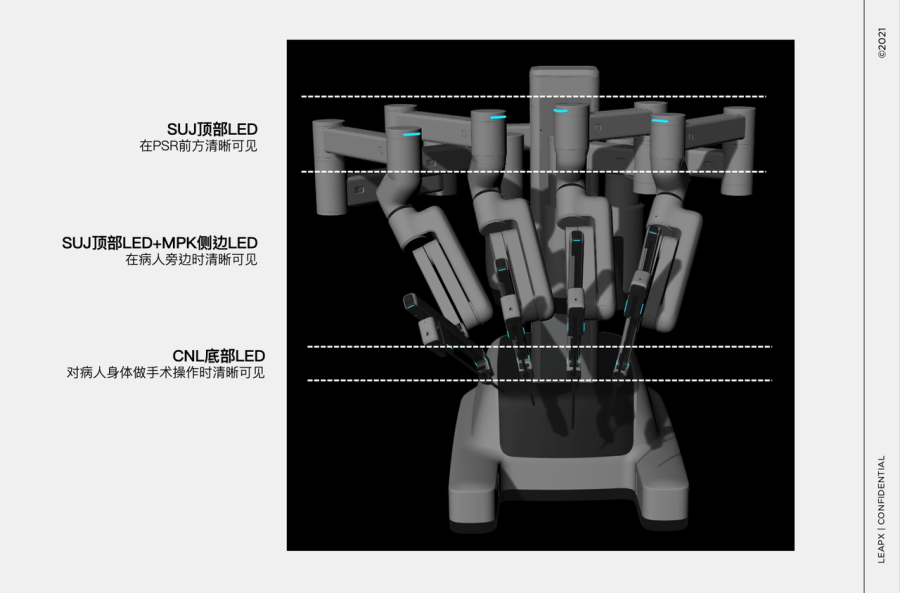
但同时,也不能把LED布置得太多太大,因为灭菌罩会让光线散射,会使大面积的LED造成光污染,干扰视线。
我们对手术室现场不同位置的医护人员在手术各阶段看到的LED视角都做了模拟,确保所有人每时每刻都能够清晰辨别各个机械臂的位置和状态。
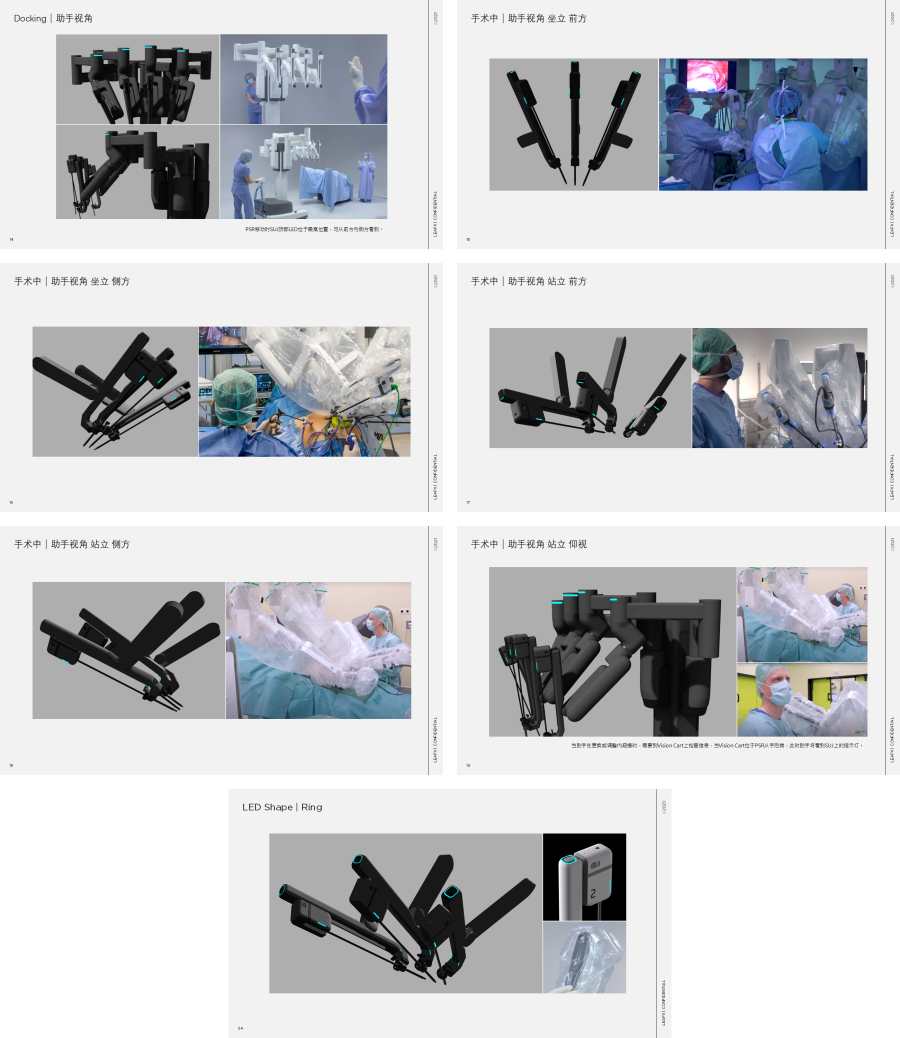
我们尝试将灯与按键/机械臂编号进行编组,以此提高按键和编号的识别度,也能保证医护人员在调整机械臂的时候都能一直清晰看到状态灯。为了保证机械臂编号在不同距离下的可读性,我们对他们的字体大小和位置都做了细致的设计,并用不同大小的标签贴纸进行测试和调整,最终选出最合适的组合。
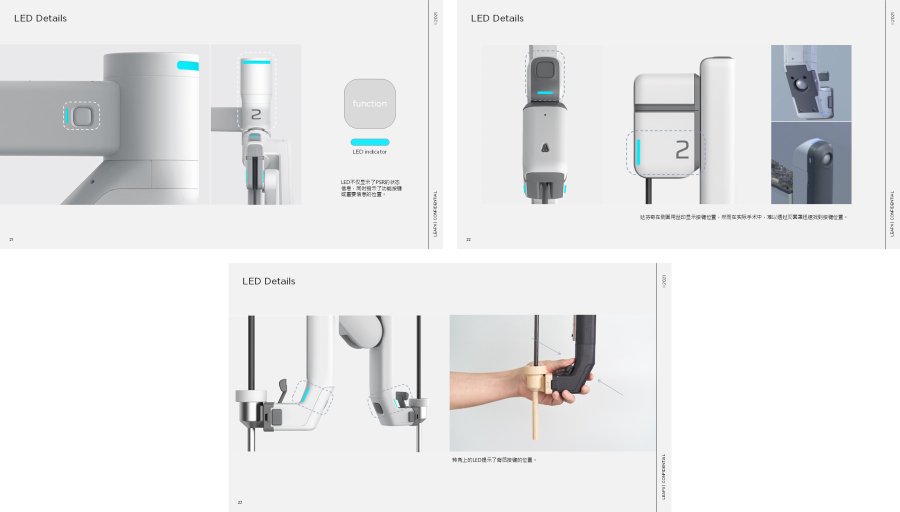
通过实物验证,确保每个按键在多种角度下都易于操作。

外观推敲
由于拥有四个大型机械臂,并带有手术工具需要进入病人体内,患者手术平台外形上天然带有一种侵略性。为了减弱它给病人造成的心理压力和恐惧感,我们使用柔和的曲面和配色来处理机械设备的各个零部件,使整体外观具有亲和力;同时细致的局部处理又让它不失专业可靠的感觉。


正面有工具的名称型号方面查找更换


影像处理平台
影像处理平台相对简单,设计上我们需要考虑屏幕的可调节性,兼容第三方医学仪器,线缆收纳,可维护性等。



这个项目设计进行了一年有余,篇幅有限,无法全部进行展示说明。有关这个项目后续的发展和落地详情,请关注康诺思腾公众号/官网。感谢康诺思腾在LeapX创业初期就给予我们充足的资源和信任,在这么高精尖的机器人研发设计中深度合作。在这个过程中,我们也深刻感受到了康诺思腾研发团队的专业,细致和做出好产品的决心。也非常感谢在调研过程中给我们细心帮助的医生和护士们。
目前,Sentire 思腾手术机器人已完成100+例多学科人体临床试验,获得NMPA批准上市,并计划在全球范围报证上市。我们期待它能在未来的手术台上大显身手,挽救生命。



小小心意,大大鼓励
本文章版权归 LEAPX Design 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。
举报






















 沪公网安备 31011502009179号
沪公网安备 31011502009179号
请问你们是用哪个AI去混合生成大量不同的架构作为前期参考的呢?
人体工学这块还得加强,长时间前倾低头工作队腰部和颈部有损伤,不能一味抄国外那个达芬奇手术机械人的作业,他们的也有可以改善的地方,应该多参考一下职业健康人体工学的资料。
不过毕竟是个大活,值得比个
普象之光再次闪耀
这是个大活儿
很好
专业设备
这简直太高级了吧
服了,非常震撼
这种深度才是扎实的创新