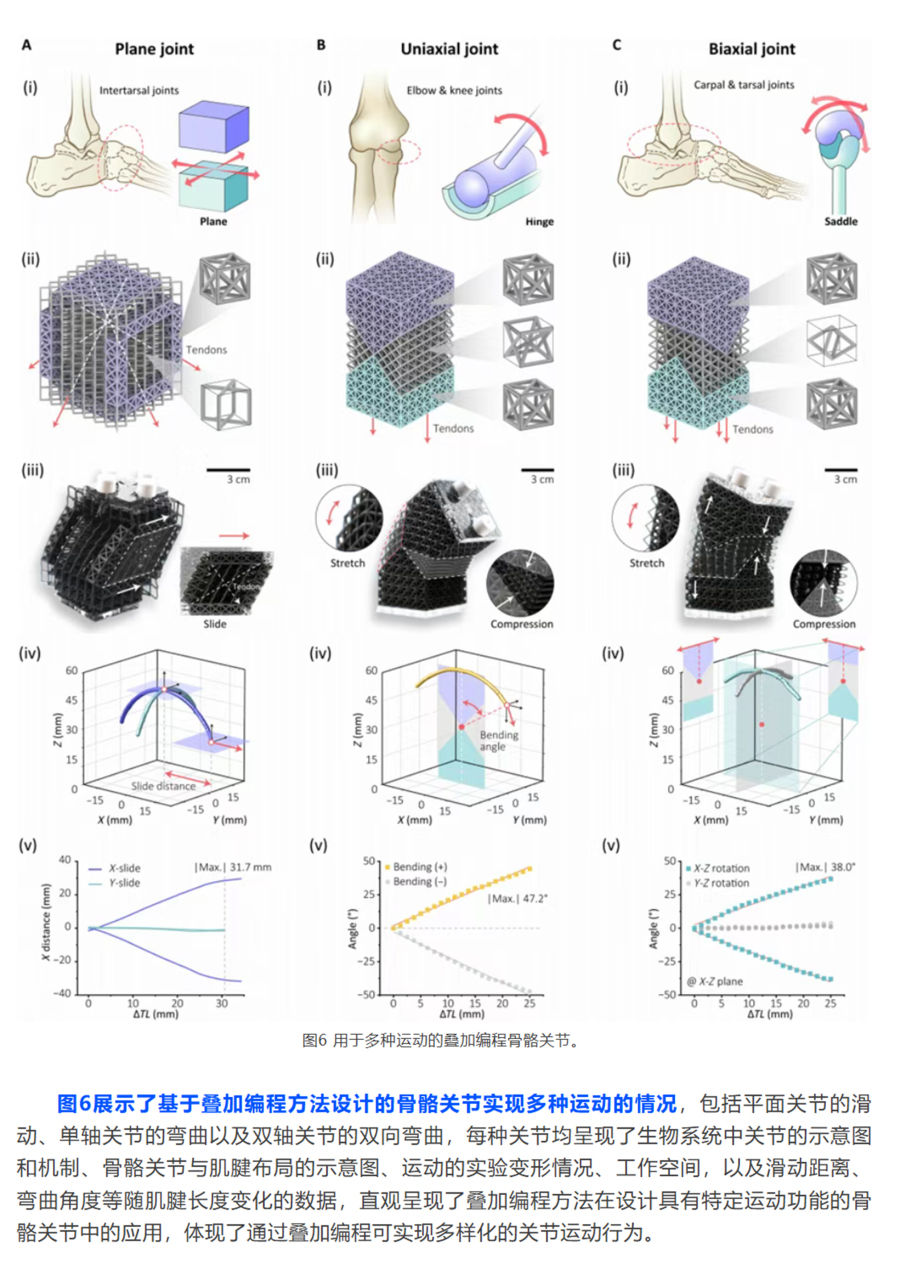
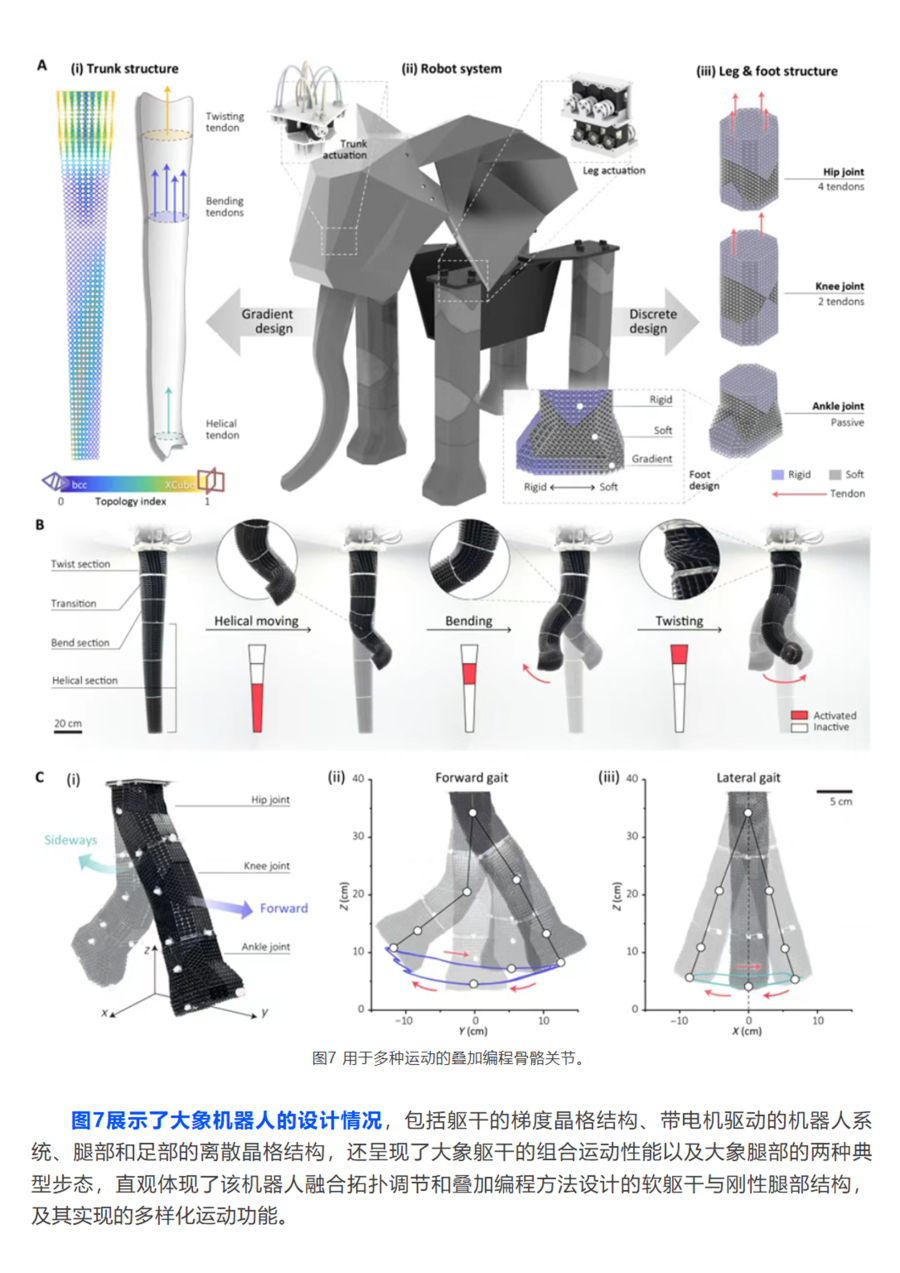
🟡洛桑联邦理工学院Josie Hughes教授团队在Science advances期刊上发表了一项重要研究成果。提出了基于单一材料晶格几何设计的编程方法,通过拓扑调节和叠加编程两种几何设计方法,实现了对晶格结构刚度和各向异性的精确调控,从而创建出具有空间变化机械性能的三维结构,可从类组织的柔顺性到类骨的承重能力;同时制造出了可编程弯曲轮廓关节的肌腱驱动式仿肌肉骨骼机器人大象,为设计轻量化、适应性强的机器人提供了解决方案。
🔵从论文中可以看到通过调节晶格的方向,造型,位置,可以像骨骼一样实现弯曲,旋转,用在具身机器人上一体化会更高更接近人类的状态


赞赏
小小心意,大大鼓励
本文章版权归 Oberon 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。
举报
2收藏文章
5赞起来+1





















 沪公网安备 31011502009179号
沪公网安备 31011502009179号
是这么回事
干货